
Surgical robots will become more diverse and enable even less invasive surgery
The Hamlyn Symposium on Medical Robotics celebrated its 10th Anniversary this year and continues to provide an enriching forum for engineers, scientists, and clinicians involved in the field. Sagentia was a sponsor of this key industry event and in this article, Rob Morgan, VP Medical at Sagentia, takes a look at some of the exciting developments emerging and the key points discussed.
It is clear that surgical robots will increasingly have a role to play in three key areas: minimally-invasive surgery, specialist functional applications (such as ENT microsurgery and vitreoretinal eye surgery) and finally combined with artificial intelligence in patient management.
The role of continuum, snake & needlescopic robots
The first surgical trend is around less invasive robots with several competing approaches in development. Intuitive surgical will soon be launching da Vinci SP, which uses distal tip articulation of the scope and provides triangulation with respect to the tool.
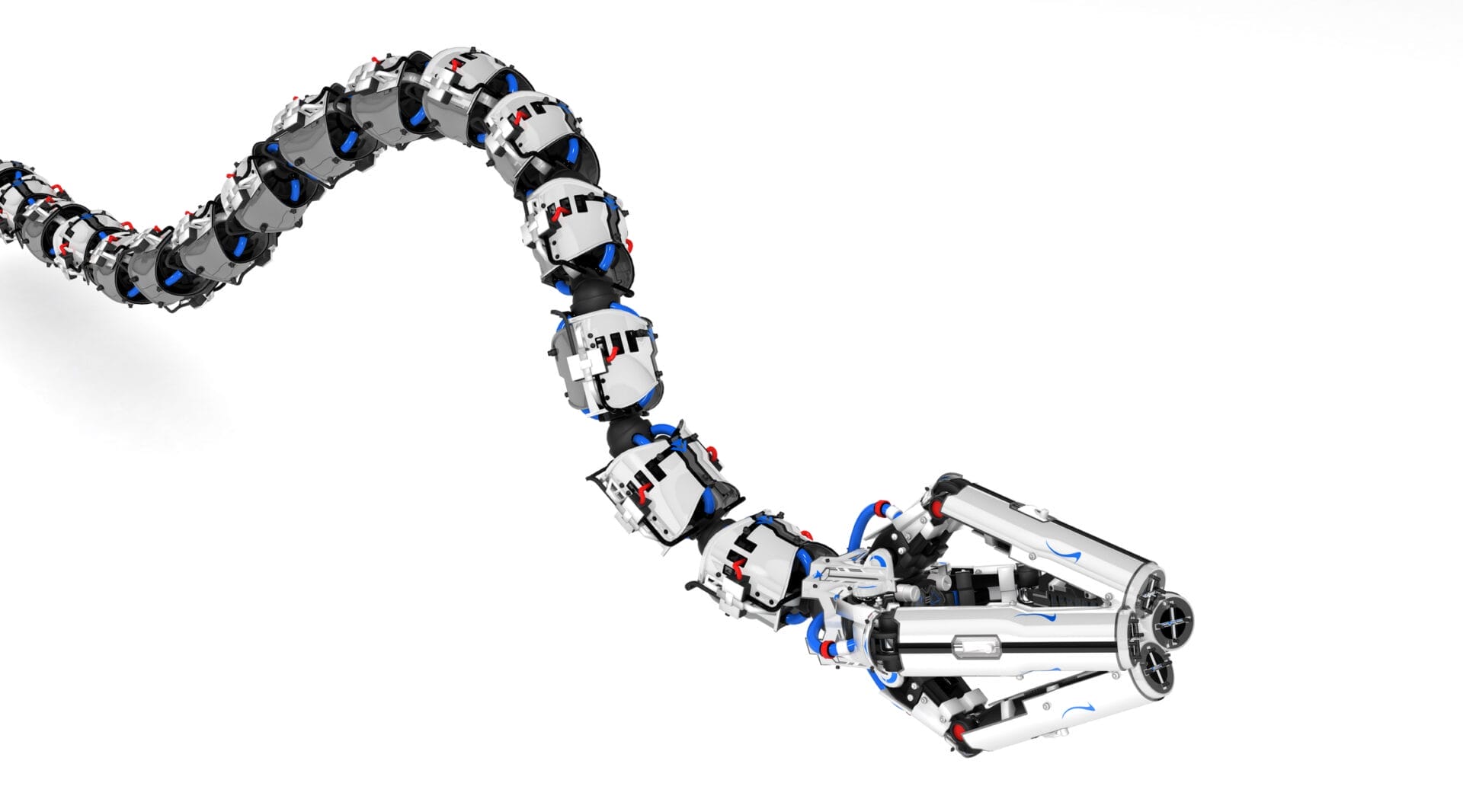
Continuum robots are able to navigate tortuous paths through the body to deliver visualization and instrumentation with less invasive access. The snake robot pioneered at Carnie Mellon University and developed by Medrobotics is on the market and cleared for transoral and colorectal indication. Other ‘Continuum’ or ‘Snake’ robots are under development by commercial and academic groups. At the symposium, the work of the Korea Advanced Institute of Science and Technology (KAIST) and the Chinese University of Hong Kong demonstrated the potential of systems designed upon of the principles of flexible endoscopy and now combined with robotised instruments. One of the primary applications of these systems is Endoscopic Submucosal Dissection for the treatment of gastrointestinal tumors.
Finally, needlescopic robots buck the trend of single point entry and use multiple ports of 3mm and less. A system developed at Vanderbilt University uses needlescopic tools to grasp one another and so control the position of low stiffness surgical instruments. Such instruments will likely be suitable for energy delivery rather than mechanical tasks but offer a different approach to less invasive robotic surgery.
Specialist robots need economies of scale
The second surgical trend is specialized robots, able to excel at specific functions and provided as smaller and less complex systems. Examples are robots for ENT microsurgery, cochlear ear implantation, MRI guided biopsy and vitreoretinal eye surgery. To be commercially successful such systems will need to achieve sufficient utilization on a daily basis, so will need to meet prevalent unmet procedural needs or enable new, high volume surgical tasks to be performed, in order to justify the capital investment cost by hospitals.
Robotic eye surgery is a case in point. Surgeons already operate under surgical microscopes so the robots do not provide the visualization benefits over existing surgery in the way the da Vinci system does in laparoscopic surgery. Surgeons are already able to operate with sophisticated surgical systems so the robot must provide an added benefit. Initial clinical applications have included retinal vein catheterisation, requiring tremor free microneedle placement for a period of 10 minutes, which is made possible by the availability of a specialized robot.
Commercial success will be dependent on broader applications in existing vitreoretinal surgery or use in new therapies, for example through enabling precise delivery of cell and gene therapies to treat back of the eye diseases such as age-related macular degeneration.
Robotics combine with AI to find new applications
Whilst the two main application classes of medical robotics are currently surgery and radiotherapy, we should highlight that the future will see robotics play a role in wider medical settings. As Artificial Intelligence (AI) is increasingly combined with robotics we expect usage to broaden.
AI is often cited as an enabler in the move to fully autonomous robots, able to make decisions and perform interventions without the control of a healthcare professional. How such sophisticated technologies are used however is still to be resolved and where will public acceptance lie? One approach might be that fully autonomous robots will first be introduced for medical activities which involve less risk to the patient than surgery.
Another application is perhaps where existing data is a good predictor of future outcomes. For example ‘diagnostics’ may, in theory, be highly risky (should there be an incorrect analysis) yet given the cause and effect nature of this type of application and the fact that it is ideally suited to data crunching then AI/robotic approaches may well have a role.
AI and robotics could ultimately be enablers of seismic change in other ways. Soft robotics might be a potential enabler of a virtual ‘simulant’ human body in which the organs are dynamically altered by a network of hydraulic or mechanically controlled ‘fingers’. This approach would make it possible to introduce localized hardening or deformation of an organ for case review or remote diagnostics purposes.
Other early examples may be ‘meet and greet’ robots taking on basic patient management tasks and then more complex tasks, such as triage, as the safety and efficacy of AI are demonstrated.
We should, therefore, look to the consumer robotics industry, as well as the existing medical robotics community, for wider medical robotics innovations.
