
Surgical product development consulting
Sagentia Innovation's surgical device consultants work closely with surgical device and equipment providers looking to address the needs of the Operating Room and the wider surgical continuum of care.
Contact us
Do you have a project you'd like to discuss with our team?
Today’s surgical healthcare providers are faced with complex, and often conflicting, demands on the need for efficiency, with increasing pressure to improve clinical outcomes and patient-reported outcome measures, while reducing the overall cost of the care cycle, as patient volumes and demands continue to outgrow budgets. Adding the surgical backlog created by the COVID-19 pandemic to this mix and the interest from providers in extending their reach beyond the Operating Room (OR), the market environment is more complex now than ever before.
With our surgical device consulting services we explore the opportunities for technology and innovation to address these challenges, but without insight and understanding, it can be difficult to know which should be considered first – which will have the greatest impact on healthcare and which will lead to commercially successful medical products?
The surgical world is evolving fast and many challenges are associated with changes in technology, regulation, reimbursement, and medical practice. The OR is increasingly served by a range of digital tools and Artificial Intelligence holds much promise for both the OR and the perioperative care of patients. But there are recognised barriers to market entry and adoption and, of course, there are there unknown challenges that need to be uncovered to create a successful product.
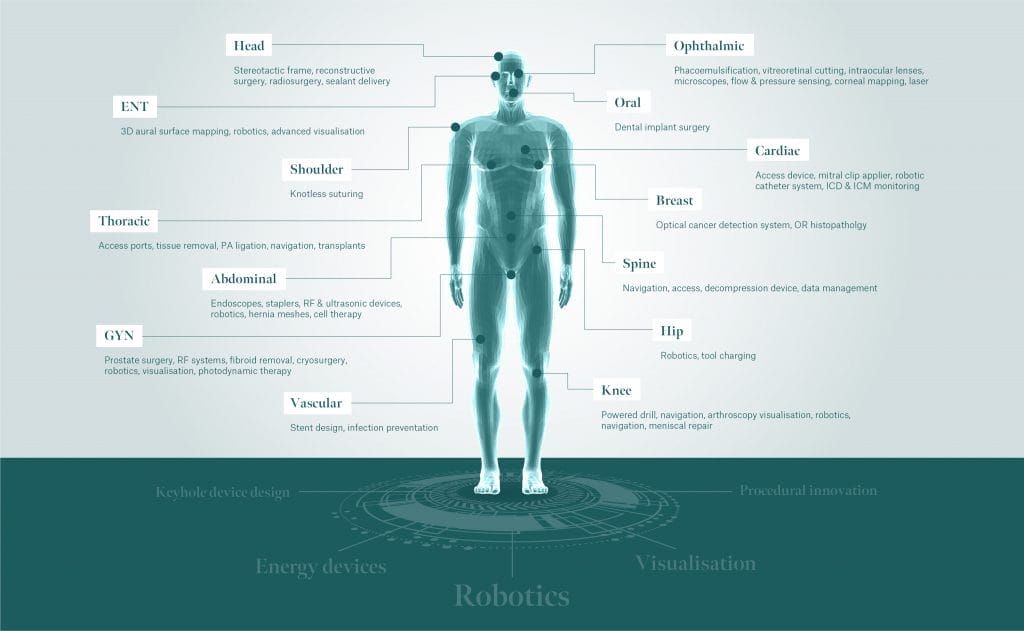
We’ve worked with medical device manufacturers and industry leaders and innovative start-ups on hundreds of surgical and interventional projects during our 30-year history – across multiple surgical specialities and across the peri-operative continuum of care. Sagentia Innovation’s medical team has deep expertise in medical device development and surgical and interventional products, regulatory consulting, including surgical robotics and navigation, energy devices, digital solutions, advanced visualisation and imaging, drug delivery, connected implants and biosurgery.
Technology for today and tomorrow
Technology for today and tomorrow
We provide both breadth and depth in technology and scientific expertise to our clients and their projects. By pulling together the best experts we’re best placed to drive cross-sector learning.
From physical, chemistry, and life sciences, to digital skills, and from electrical and mechanical engineering, to sensory science, we can drive more efficient project understanding, innovation, and development.
